
Bertleja S, Academic Content Writer for Physics at Edumarz.
Ultrasounds are sound waves with frequencies higher than the upper audible limit of human hearing (>20 kHz).
Applications:
Cleaning:
Ultrasound is used to clean objects with hard-to-reach parts (spiral tubes, electronic components, odd shaped parts, etc.). Ultrasonic waves are passed into a suitable cleaning solution and the object is placed in it. High-frequency waves that are generated cause the dirt and grease to detach from the object.

Fig 1: Ultrasonic cleaning
Detecting Cracks in Metal Blocks:
Metal components are used in construction of bridges, machines, scientific equipment, etc. Small defects inside the metal blocks may largely affect the quality of the structure. To detect any defects, Ultrasonic waves are passed through the metal block.
Ultrasound waves pass through and are detected by the detector – No defect
Ultrasound waves get reflected back – Presence of defect.
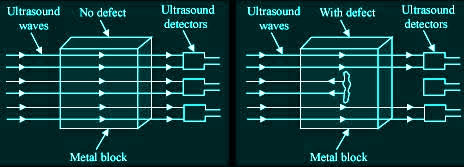
Fig 2: Finding defects using Ultrasound.
Echocardiography (ECG):
Ultrasonic waves are transmitted through the heart and are reflected back forming the image of the Heart.
Fig 3: Echocardiography
Ultrasonography:
Ultrasound scanning helps to get the images of internal organs to detect abnormalities. The ultrasonic waves reflect back from the regions where there is a change in tissue density. These reflected waves are converted to electrical signals which generate the image of the organ.

Fig 4: Foetal Ultrasound
Lithotripsy:
Lithotripsy is a technique in which ultrasonic waves are passed through the body to break down kidney stones which causes the stones to get flushed out with urine.
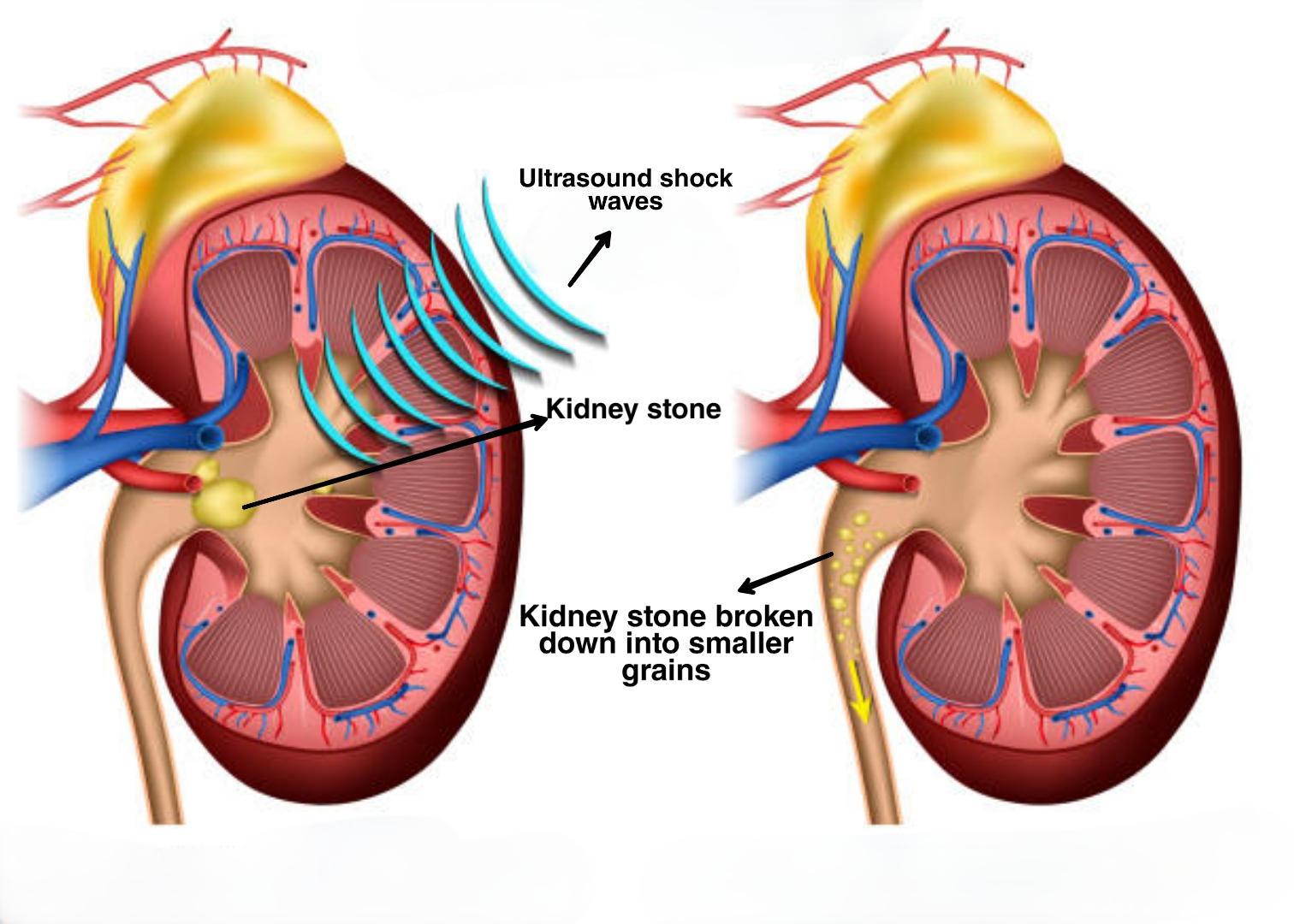
Fig 5: Shock wave lithotripsy for Kidney
SONAR (SOund Navigation And Ranging)
SONAR technique uses Ultrasonic waves in water to locate the position or motion of objects.
Components of SONAR:
Emitter/Transmitter: Produces and Transmits ultrasonic waves to different directions underwater.
Detector/Receiver: Detects the ultrasonic waves that are reflected back from the object underwater.
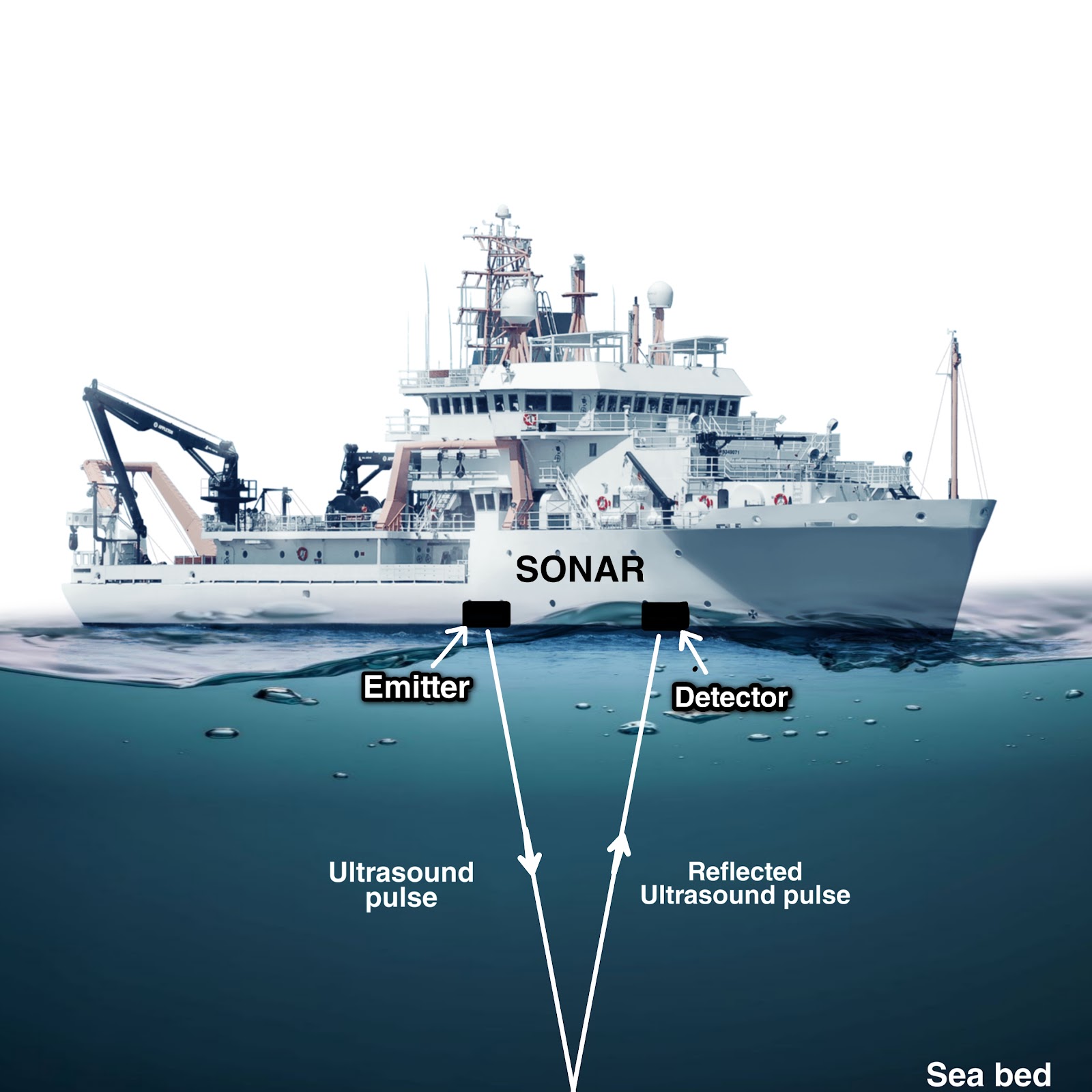
Fig 6: Ultrasound sent by the transmitter and received by the detector.
Echo-ranging:
The method used to find the distance of underwater objects and the depth of sea is called echo-ranging.
2d = v×t
Where,
v – Speed of sound in seawater
t – Time taken for the ultrasound signal to return after transmission.
2d – Total distance travelled by the ultrasound.
Therefore, the depth of the sea or the distance of the object from the ship can be obtained by,
d = v × t
2
Echolocation:
Animals such as bats and Dolphins use echolocation based on ultrasound to detect any obstacles.

Fig 7: Ultrasound is emitted by a Bat and is reflected back by the prey or an obstacle.